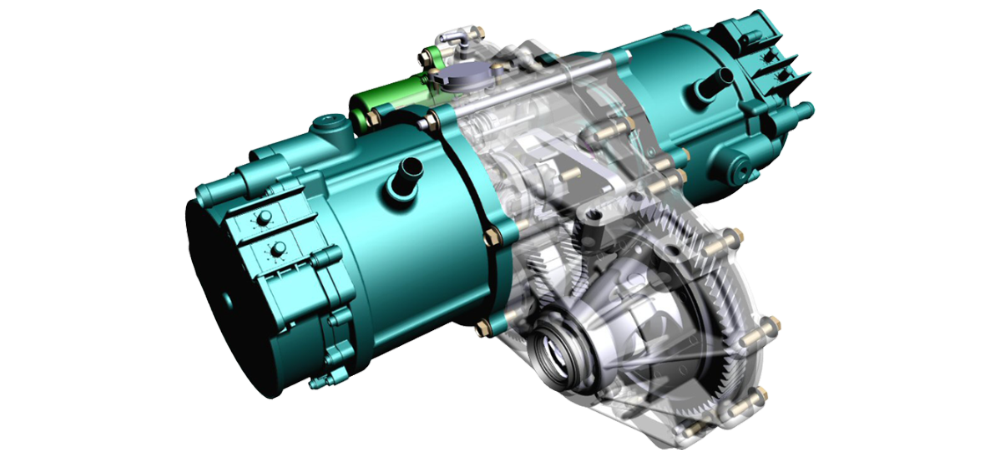
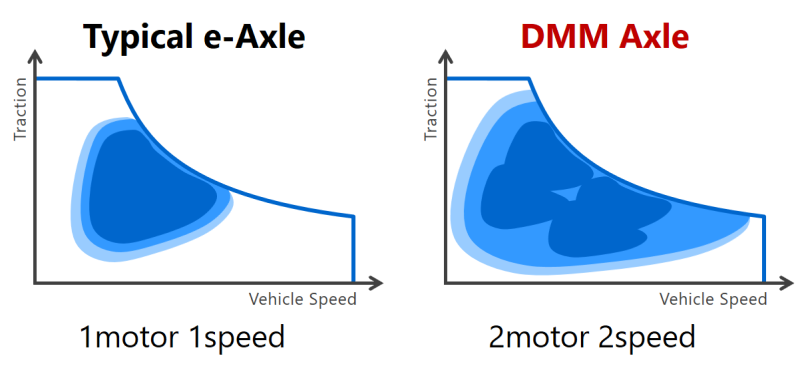
"DMM Axle" is an innovative e-Axle with two motors and a two-speed transmission mechanism that achieves both low power consumption and high power performance. This is achieved by automatic switching control between power running 4 mode and regeneration 2 mode. In addition, the compact and flat structure allows the vehicle to have a lower center of gravity and freedom in interior and exterior design.
more
"DMM Axle" greatly expands the driving scene with high motor efficiency by switching the combination of 2 motors and 2nd speed shift according to the driving scene, and enables power saving driving at both low speed and high speed.
more
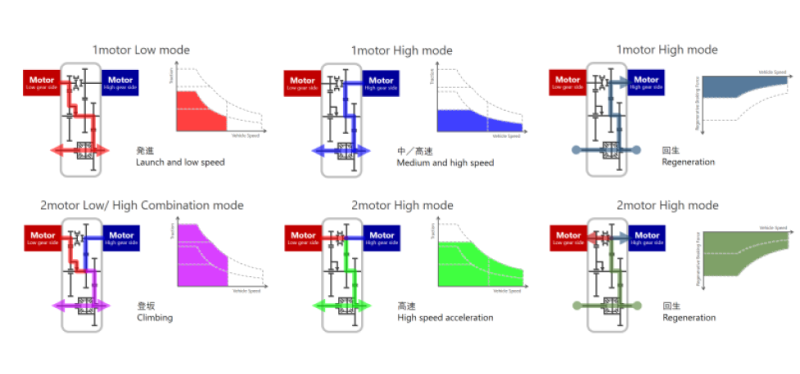
It seamlessly and automatically switches between four optimal drive modes with two motors and two-speed shifting according to the driving conditions, achieving high driving performance while maintaining low power costs.
1motor Low mode is used from start to low speed.
The torque of only the left motor is transmitted to the tire via the Low gear.
1motor High mode is used in the running scene with reduced power consumption at high speed from the medium speed.
Only the torque of the right motor is transmitted to the tires via the High gear.
2motor Low / High Combination mode is used for driving scenes that require power, such as uphill roads.
The left and right motors are operated at the same time, and the output is combined on the second axis and transmitted to the tires.
The 2motor High mode is used in driving scenes that require powerful acceleration at high vehicle speeds, such as high-speed merging and overtaking.
When the left and right motors have the same rotation speed and the dog clutch on the first axis is operated, the left and right motors are directly connected and their torque is combined.
The combined torque is transmitted to the tire via the High gear.
Regeneration is possible in two modes, 1motor High and 2motor High.
more
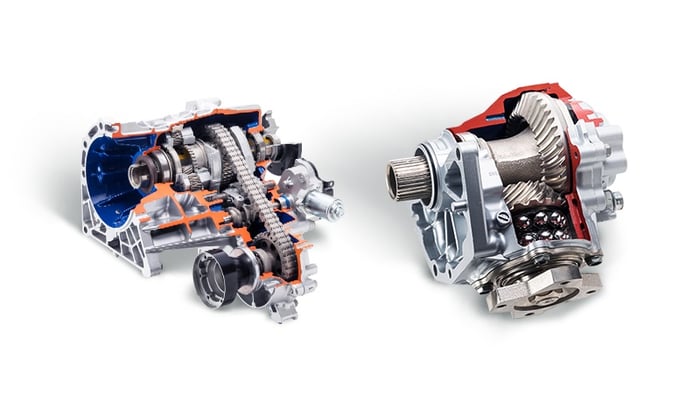
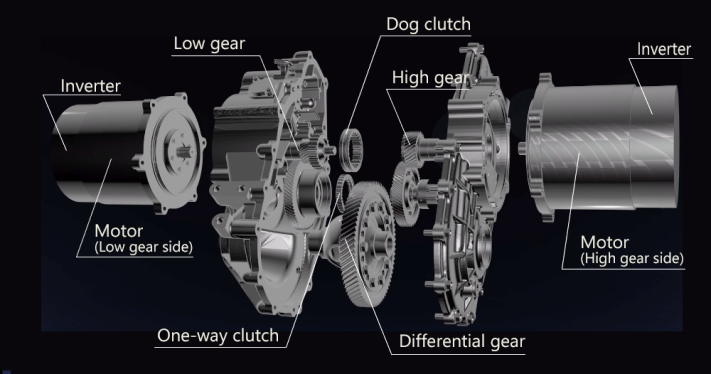
DMM Axle is an e-Axle with a 3-axis structure that integrates a motor, an inverter, and a gearbox.
The motor and inverter on the low gear side, and the motor and inverter on the high gear side are arranged symmetrically.
Each motor is connected to the Low and High gears.
A one-way clutch is built in the inner circumference of the Low gear on the second axis to realize seamless shifting.
When the rotation speed of the second shaft directly connected to the high gear exceeds the rotation speed of the low gear, the lock of the one-way clutch is released, the low gear becomes free, and the low mode is seamlessly switched to the high mode.
The left and right motors can be directly connected by the dog clutch installed on the first axis, realizing powerful driving in the required scene.
more
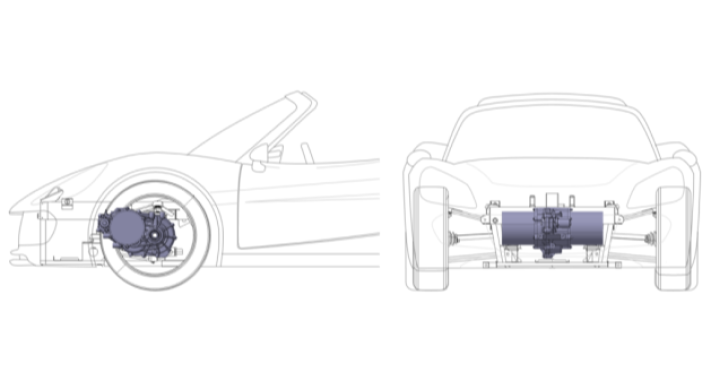
The symmetrical, thin, flat and compact shape of the "DMM Axle" allows it to be mounted at a lower position on the vehicle.
This lowers the center of gravity of the vehicle and enables more stable driving.
It also increases the freedom of interior and exterior design.
Furthermore, due to its compactness, it can be applied to various vehicle layouts.

In collaboration with electric vehicle manufacturer GLM, we created a prototype car based on Tommykaira ZZ and equipped with DMM Axle on the front and rear of the A total of four motors output 60kW, 220Nm, and the maximum speed is 180km / h and demonstrates 0-50km / h acceleration in 2.2 seconds.
It continues to evolve day by day through repeated tests such as function / performance / conformity.

download
Download our Corporate Brochure.

download
Download our Product Catalog.